Полное руководство по OpenMind: построение глобальной операционной системы и сети доверия для воплощённого интеллекта
Почему важна эра открытой робототехники
В ближайшие 5–8 лет, по прогнозам, численность роботов в мире превысит один миллиард. Это станет переломным моментом: роботы перестанут быть изолированными экспериментами и станут активными участниками разделения труда в обществе. Роль роботов выйдет за пределы механических манипуляторов на конвейерах — они станут коллегами, преподавателями и партнёрами, способными воспринимать, интерпретировать, принимать решения и взаимодействовать с людьми.
Технический прогресс в аппаратной части робототехники — ловкие манипуляторы, устойчивая локомоция, продвинутая сенсорика — идёт бурно, но главный барьер связан не с «железом», а со способностью роботов обмениваться знаниями и работать вместе:
- Программные платформы разных производителей несовместимы, что мешает обмену навыками и интеллектом между роботами.
- Механизмы принятия решений закрыты внутри изолированных систем, что исключает внешнюю проверку или оптимизацию.
- Централизованные архитектуры управления сдерживают инновации и мешают формированию доверия.
Из-за этой разобщённости индустрия не может превратить достижения AI в масштабируемый рост производительности: демонстраций роботов становится всё больше, но они существуют разрозненно, не способны мигрировать между платформами, не гарантируют проверяемости решений или стандартизации сотрудничества. Настоящая масштабируемость пока невозможна. OpenMind берётся решить проблему финального шага. Наша цель — не очередной «танцующий робот», а единая программная база и стандарт коллаборации для всего разнообразия роботов:
- Роботы могут понимать контекст и обучаться друг у друга;
- Разработчики быстро создают приложения на открытых модульных платформах;
- Люди и машины сотрудничают и совершают транзакции безопасно, используя децентрализованные протоколы.
Иными словами, OpenMind формирует универсальную операционную систему для роботов — платформу, отвечающую не только за восприятие и действия, но и за защищённое, масштабируемое сотрудничество в любой среде на основе децентрализованного взаимодействия.
Кто поддерживает это видение: $20 млн инвестиций и глобальные партнеры
OpenMind привлекла $20 млн в посевном и серии A раундах под руководством Pantera Capital, а также при участии ведущих мировых технологических и инвестиционных фондов:
- Западные технологические и финансовые фонды: Ribbit, Coinbase Ventures, DCG, Lightspeed Faction, Anagram, Pi Network Ventures, Topology, Primitive Ventures, Amber Group и другие. Эти компании — лидеры в инфраструктуре криптовалют и искусственного интеллекта, поддерживающие формирование рынка «экономики агентов» и «интернета машин».
- Восточные индустриальные партнеры: Sequoia China и другие гиганты с уникальной экспертизой в цепочках поставок и производстве, отлично знающие реальные вызовы массового выпуска и внедрения роботов.
Одновременно OpenMind активно работает с крупными игроками традиционного рынка капитала, такими как KraneShares: исследует способы интеграции долгосрочной инвестиционной ценности «робототехника + AI-агенты» в структурированные финансовые инструменты, сочетая крипто- и фондовый рынки. В июне 2025 года, когда KraneShares запустила биржевой фонд Global Humanoid & Embodied Intelligence Index ETF (KOID), впервые на NASDAQ церемонию открытия торгов провёл гуманоид «Iris», созданный OpenMind и RoboStore.
Как отметил партнёр Pantera Capital Нихал Маундер:
«Если мы хотим, чтобы умные машины работали в открытой среде, нам нужна открытая сеть искусственного интеллекта. Для роботов OpenMind делает то, что Linux сделал для ПО, а Ethereum — для блокчейна».
Команда и советники: от лабораторий к производству
Основатель OpenMind Ян Липхардт — доцент Стэнфорда, экс-профессор Беркли, эксперт по данным и распределённым системам с богатым научным и инженерным опытом. Он — сторонник повторного использования open-source-кода, перехода от «чёрных ящиков» к прозрачным, проверяемым решениям, интеграции AI, робототехники и криптографии на стыке дисциплин.
В ядре команды — специалисты из OKX Ventures, Oxford Robotics Institute, Palantir, Databricks, Perplexity и других компаний. Их компетенции охватывают все ключевые направления: управление роботами, восприятие и навигацию, мультимодальные модели и LLM-оркестрацию, распределённые системы, ончейн-протоколы. Советники — ведущие учёные и индустриальные эксперты: руководитель лаборатории робототехники Стэнфорда Стив Кузинс, глава Oxford Blockchain Center Билл Роско, профессор безопасного AI Имперского колледжа Алессио Ломускио. Это гарантирует безопасность, соответствие стандартам и надёжность решений OpenMind.
OpenMind: два уровня — единое управление
OpenMind создала инфраструктуру, позволяющую роботам обмениваться информацией и работать в сотрудничестве независимо от устройств, производителей и географии:
- Уровень устройств: OM1 — искусственный интеллект как ОС для физических роботов; замыкает цикл от восприятия к исполнению, так что любой робот, независимо от типа, воспринимает окружающее и выполняет задачи.
- Сетевой уровень: FABRIC — децентрализованная сеть коллаборации, обеспечивающая идентификацию, назначение задач и коммуникацию: роботы узнают друг друга, координируются и оперируют статусами в реальном времени.
Такой подход — «ОС + сетевая прослойка» — позволяет роботам быть автономными, но при необходимости выстраивать коллективные процессы для совместного решения сложных задач в единой сети.
OM1: искусственный интеллект как операционная система для физического мира
Как смартфон не работает без iOS или Android, так и роботам нужна ОС, способная развёртывать AI-модели, обрабатывать сигналы датчиков, делать выводы и инициировать действия.
OM1 — специально созданная для этого AI-нативная ОС для реальных роботов: она даёт им возможность воспринимать, понимать, планировать и действовать в любой среде. В отличие от закрытых систем управления, OM1 — open-source, модульная, аппаратно-независимая: подходит для гуманоидов, квадропедов, колёсных платформ, манипуляторов и других конструкций.
Четыре основных стадии: от восприятия к действию
OM1 разделяет интеллект робота на четыре ключевых этапа: восприятие → память → планирование → действие. Каждый этап оформлен как модуль, а единый язык данных позволяет сочетать, изменять и проверять интеллектуальные компоненты.
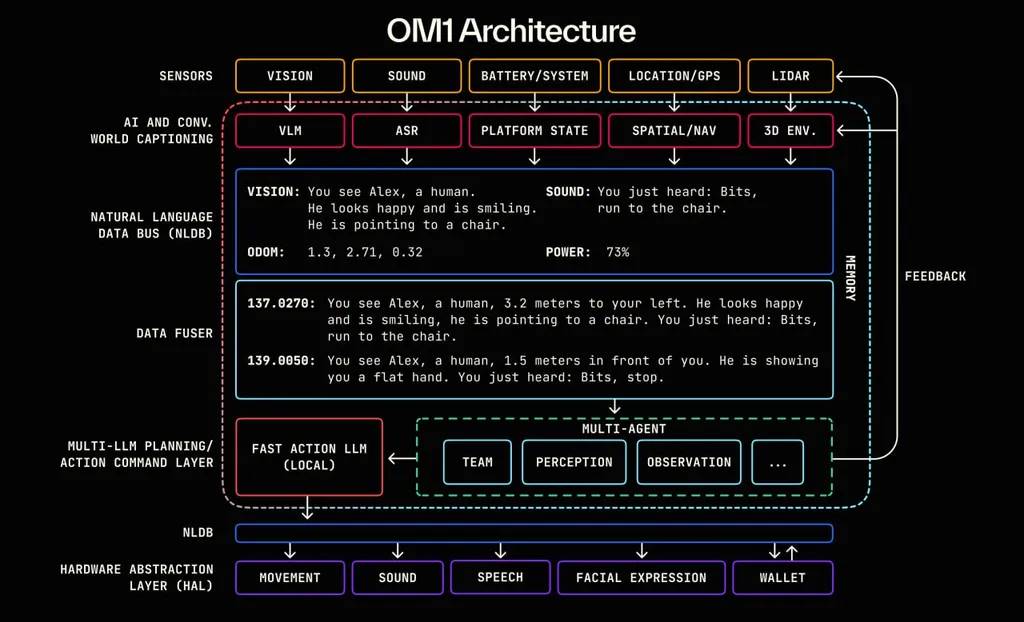
Архитектура OM1
В архитектуре OM1 выделяют семь слоев:
- Слой сенсоров: собирает данные с камер, LIDAR, микрофонов, контролирует заряд, GPS и другие мультисенсорные источники.
- Слой AI + описания мира: мультимодальные модели конвертируют визуальные, аудио- и статусные данные в текстовые описания (например, «Перед вами человек, машущий рукой»).
- Шина природного языка: преобразует все восприятие в предложения с метками времени для обмена между модулями.
- Модуль объединения данных: интегрирует поступившую информацию для формирования полного контекста для следующих решений.
- Слой мультимодельного AI-планирования: несколько LLM интерпретируют ситуацию и разрабатывают планы в рамках ончейн-правил.
- Нисходящий канал NLDB: передаёт решения через языковой посредник в исполнительную систему робота.
- Слой абстракции оборудования: преобразует команды в управление движением, речью, транзакциями и прочим на низком уровне.
Быстрая интеграция и массовое развертывание
OM1 оснащён инструментами, позволяющими быстро превращать замыслы в задачи для роботов:
- Молниеносное внедрение навыков: добавляйте новые сценарии поведения на базе естественного языка и LLM за часы, а не месяцы.
- Мультимодальная интеграция: комбинируйте данные с LiDAR, камер, аудиосенсоров без ручного программирования логики слияния.
- API к большим моделям: встроенные интерфейсы для GPT-4o, DeepSeek, VLM и других языковых/визуальных моделей, поддержка голосовых команд.
- Высокая совместимость: простое подключение к ROS2, Cyclone DDS и другим протоколам, интеграция с имеющимся ПО для роботов. OM1 работает с Unitree G1, Go2, Turtlebot, манипуляторами и другими устройствами.
- Интеграция FABRIC: поддержка нативной идентификации, координации задач и ончейн-платежей — роботы могут работать в глобальной сети либо автономно.
OM1 уже применяется на практике:
- Frenchie (квадропед Unitree Go2): справился со сложными задачами на USS Hornet Defense Technology Showcase 2024.
- Iris (гуманоид Unitree G1): участвовала в демонстрациях человека и робота на стенде Coinbase на EthDenver 2025, планируется к внедрению в учебные программы вузов США через RoboStore.
FABRIC: децентрализованная сеть взаимодействия человека и машины
Даже самые современные роботы бесполезны без безопасного, доверенного взаимодействия друг с другом. На практике устройства разных производителей закрыты, обмен опытом и данными невозможен, а совместная работа между брендами и странами осложняется отсутствием идентификации и стандартов. Ключевые задачи:
- Идентификация и геолокация: определение, какой это робот, где он и чем занят.
- Обмен навыками и данными: безопасный доступ к данным и возможностям других роботов.
- Управление доступом: регулирование частоты, объёма и условий предоставления навыков и данных.
FABRIC решает эти задачи — это децентрализованная сеть OpenMind для единой идентификации, постановки задач, коммуникаций и расчётов между роботами и AI-системами. FABRIC выступает как:
- GPS для роботов: определяет местоположение и пригодность к совместной работе.
- VPN для роботов: позволяет безопасно, напрямую соединяться без публичных IP или сложных настроек.
- Планировщик задач: автоматизирует публикацию, распределение и отслеживание задач на протяжении всего жизненного цикла.
Ключевые сценарии применения
FABRIC уже реализует ряд сценариев:
- Удалённое управление и мониторинг: безопасно управляйте роботами из любой точки без особых сетей.
- Маркетплейсы «робот как сервис»: заказ уборки, инспекции, доставки и других услуг по принципу вызова.
- Краудсорс-картографирование: отдельные роботы и флоты формируют высокоточные карты, передавая данные о среде в реальном времени.
- Сканирование и картографирование по требованию: используйте локальных роботов для 3D-моделирования, строительных обследований, сбора страховых доказательств и др.
FABRIC обеспечивает прозрачную верификацию и отслеживаемость: кто, когда и где выполнил работу, а также чётко определяет условия вызова навыков и выполнения задач.
В перспективе FABRIC станет «App Store» для машинного интеллекта: навыки лицензируются и запускаются по всему миру, а данные о применении возвращаются в модели, совершенствуя сеть.
Web3 внедряет открытость в цифровое общество машин
Рынок робототехники всё больше централизуется: немногие платформы контролируют «железо», алгоритмы и сети, блокируя внешние инновации. Децентрализация даёт возможность каждому роботу, независимо от производителя или владельца, сотрудничать, делиться компетенциями и совершать расчёты в открытой сети — без монополии платформы.
OpenMind использует ончейн-инфраструктуру для программирования правил сотрудничества, разрешений на применение навыков и моделей оплаты в прозрачный, проверяемый и обновляемый «сетевой порядок»:
- Проверяемая идентичность: каждый робот и оператор получают уникальную ончейн-идентификацию (стандарт ERC-7777), при этом характеристики, роли и права полностью прозрачны.
- Открытое распределение задач: задачи публикуются, получают отклики и распределяются по прозрачным правилам; сотрудничество фиксируется в зашифрованных ончейн-доказательствах со временем и местом.
- Автоматический расчет и распределение дохода: после сдачи задачи доходы, страховые выплаты и залоги разблокируются либо удерживаются автоматически; любой участник может проверить результаты в реальном времени.
- Глобальная ликвидность навыков: ончейн-контракты определяют лимиты использования и совместимость устройств, защищают интеллектуальные права и позволяют мировое распространение и вызов навыков.
Эта архитектура открыта всем — её можно свободно использовать, анализировать и совершенствовать. Для сообщества Web3 это означает по-настоящему анти-монопольную, компонуемую и проверяемую экономику роботов — уникальный шанс сделать «открытость» фундаментом общества машин.
Преодолеть изоляцию воплощённого интеллекта
Сегодня роботы патрулируют больницы, обучаются в школах, картографируют города — они выходят из зоны показательных демонстраций и становятся надёжными, повседневными участниками общества. Роботы работают 24/7, соблюдают правила, накапливают опыт, осваивают новые навыки и естественно взаимодействуют с человеком и другими машинами.
Для масштабирования такого взаимодействия нужны не просто более умные роботы — необходим надёжный протокол для бесшовной интеграции и совместной работы. OpenMind с OM1 и FABRIC уже заложила такую основу: OM1 даёт роботам глубокое понимание мира и автономию, а FABRIC распределяет эти возможности глобально. Следующая задача — распространить эту инфраструктуру на новые города и сети, чтобы машины стали устойчивыми и надёжными партнёрами в социуме.
Стратегия OpenMind:
Краткосрочные цели: завершить прототип OM1 и первую версию FABRIC, внедрить ончейн-идентификацию и основные функции сотрудничества.
Среднесрочные цели: внедрять OM1 и FABRIC в образование, дома, бизнес; формировать сообщество ранних пользователей и разработчиков.
Долгосрочные цели: сделать OM1 и FABRIC глобальным стандартом, чтобы любая машина могла подключаться к открытой сети — как к интернету — и формировать устойчивую мировую экономику роботов.
В эпоху Web2 роботы были частью закрытых экосистем, их функции и данные были недоступны между платформами. В мире, который строит OpenMind, роботы — это равноправные узлы, свободные к присоединению, обучению, сотрудничеству и расчетам: они работают наравне с людьми, в прозрачном, заслуживающем доверие цифровом обществе машин. Масштабная трансформация становится возможна именно благодаря OpenMind.
Отказ от ответственности:
- Данная статья перепечатана с сайта TechFlow. Авторские права принадлежат TechFlow. Если у вас есть вопросы по перепечатке, обратитесь в команду Gate Learn. Мы рассмотрим ваш запрос согласно действующим процедурам.
- Отказ от ответственности: мнения, выраженные в материале, принадлежат автору и не являются инвестиционной рекомендацией.
- Переводы на другие языки выполнены командой Gate Learn. Не разрешается воспроизводить, распространять или копировать данный перевод без явного указания Gate.com как источника.
Похожие статьи

Что такое Tronscan и как вы можете использовать его в 2025 году?

Что такое Нейро? Все, что вам нужно знать о NEIROETH в 2025 году

Что такое индикатор кумулятивного объема дельты (CVD)? (2025)

Что такое Solscan и как его использовать? (Обновление 2025 года)

15 криптовалютных проектов уровня 1 (L1), на которые стоит обратить внимание в 2024 году
